
そろそろ動きモノの電子工作をやってみようかなと思ったので、モーターを接続する用の拡張基板をつくってみました。
設計

基板のデザインはこんな感じです。 変わったICを載せているわけではないのでとってもシンプル
ハート型にしたのは… ロボットのコアってハート型であってほしいよね っていうイメージからです。 市販の拡張シールドとかだと無骨すぎてわくわくしないよね
駆動するモーターとしては サーボモーターのSG90 と ステッピングモーターの28BYJ-48 を想定しています。
サーボモーターは「どこまで回すか(絶対値)」を指定できるモーターで、ステッピングモーターは「どれだけ回すか(相対値)」を指定できるモーターです。
どちらも定番のモーターみたいです。 5Vで動き、安く手に入るのがうれしい
SG90は8つ、28BYJ-48は4つ繋げるようにしてあります。
ただしモーターは消費電流が多いため、たくさん繋げた時でもちゃんと動くかは不明です。
まぁ「全部繋いで全部同時に動かす」みたいなことをしなければいいだけですから、運用でどうにかなる範囲ではあります。 5VのUSB充電器だとApple充電規格の2.1~2.4Aあたりが多いはずなので、結構余裕はあるんじゃないでしょうか


組み立て

材料はこちら
基板とRaspberry Pi Picoは当然として、28BYJ-48を買ったらついてくるドライバボード4つも使います。
あとはUSB-C端子と5.1kの抵抗、0.1µFのパスコンにピンヘッダあたりが必要です。

まずドライバボードからモータードライバICを剥ぎ取ります。 ピンを曲げないように気をつけましょう。
IC引き抜きツールを使うと楽に抜けます。 MakerWorld に3Dモデルをアップロードしておいたのでよかったらどうぞ

ざっとはんだづけして完成!
スルーホール部品が多いので詰まるところはありません。
狭ピッチのため難しいと言われるUSB-C端子も、はんだブリッジしにくいようにフットプリントを改造してあるので楽ちんです。
動作の様子
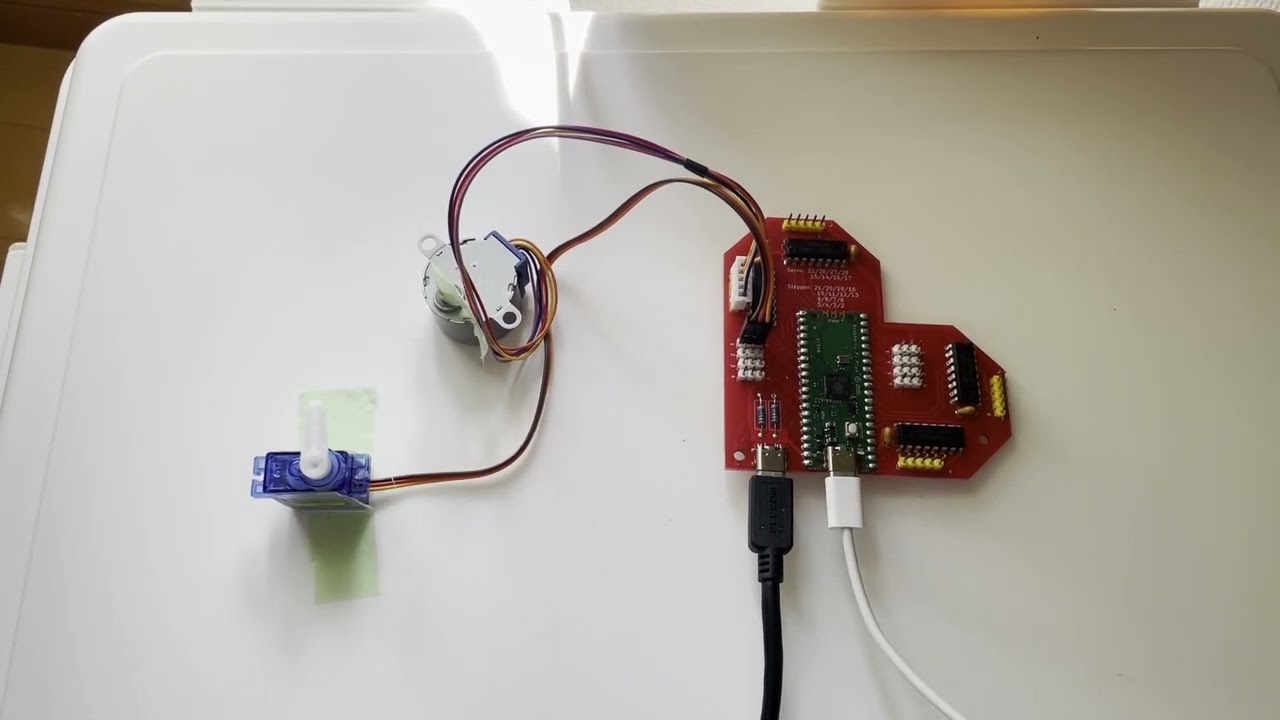
とりあえずサーボモーターとステッピングモーターを1つずつ動かしてみました。
ちゃんと動いていてひと安心です。
サーボモーター8つとステッピングモーター4つがあれば、四足歩行ロボットやロボットアーム、4WDのラジコンなどいろいろ作れるようになります。 今後のものづくりがますます楽しみです!
基板データは GitHub にアップロードしてありますよ〜
アプリなどを作ったりしています! よかったらみていってください→
つくったもの
今のイチオシ↓
