
先日、モーターを使った初工作として ペンプロッタ をつくったのですが、ソフトウェアのほとんどをAI任せにしてしまいました。
処理の流れや使用するライブラリの選定など、おおまかな設計はしたものの細かい処理はAIに任せっきりでした。 そのせいでバグ取りに苦労することになっちゃいましたよ…
いきなり複雑な制御をしようとするとAI頼みになってしまうことに気づいたので、簡単な工作からステップアップしてみることにします。
モーターが2個の簡単なロボットなら、AIを使ったとしても理解しながら進められそうなのでこれに決定!
設計

さっそく設計…といっても、車輪をつけたモーターを固定するだけですが。
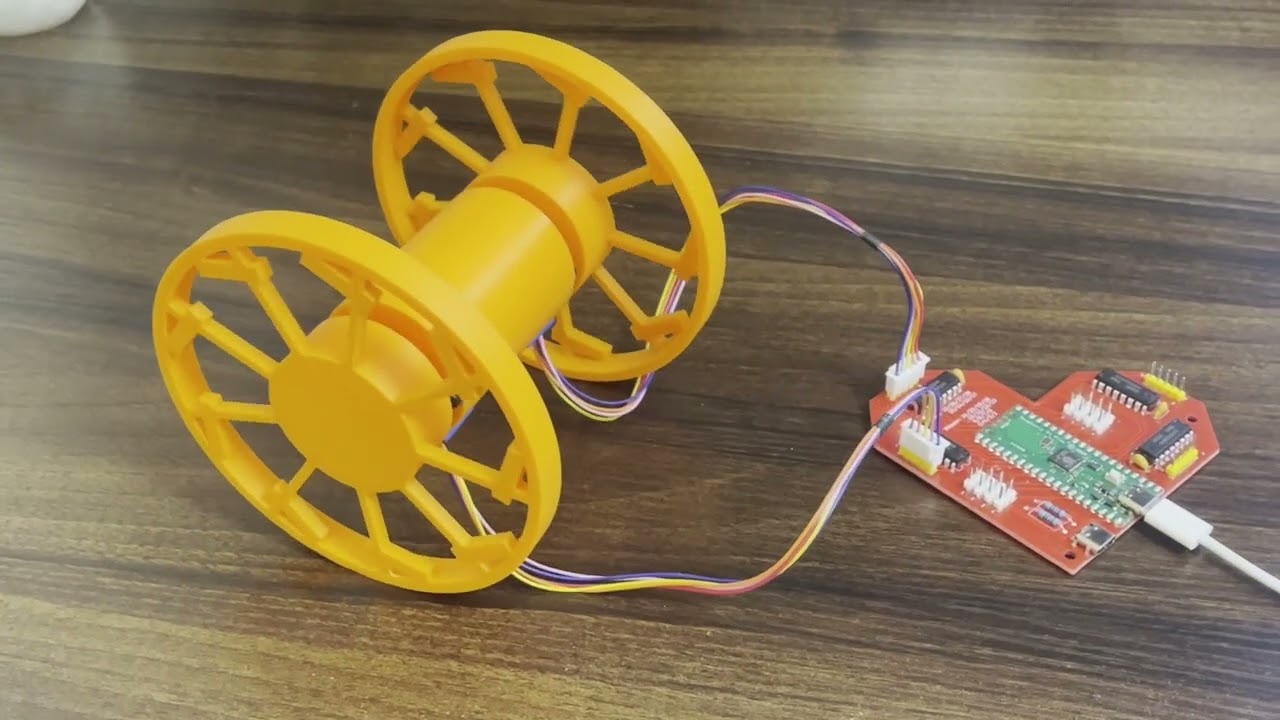
ちょうどいいモチーフがないか調べてみたところ、イギリスの昔の兵器の パンジャンドラム がイメージにぴったりだったので寄せてみました。

モーターを真ん中の棒に埋め込み、軸の重心を偏らせることでロボットが勝手に転がって行かないようにしています。
また、2つの車輪の回転方向を組み合わせることで前進/後退/右旋回/左旋回が可能になります。 モチーフのパンジャンドラムは前進しかできなかったみたいですが…
動かす
摩擦の小さい机の上で走らせたのでちょっと空回り気味ですが、思い通りに動いてくれました。
自作のモーター制御基板 を引きずりながら元気に転がっています。
目論見通り、AIを使いながらも要所要所を把握しながら進めることができました。
2輪の制御はできたので、次は4輪を試してみようと思います。 ただ、普通の4輪じゃ面白くないので変わったタイヤでも使ってみようかな?
設計データは GitHub で公開しています〜
アプリなどを作ったりしています! よかったらみていってください→
つくったもの
今のイチオシ↓
